2Dパターンによるカメラキャリブレーション
¶ 1. はじめに
Camera Calibration(カメラキャリブレーション)とは、カメラの各種パラメータを推定することです。言い換えると、カメラが写真を撮影したとき、画像上のある 2D 点が現実世界の 3D 点に対応するために必要なすべてのパラメータを得る、ということになります。ここには intrinsic parameters(カメラ内部パラメータ)と extrinsic parameters(定向/姿勢・外部パラメータ)が含まれます。
画像上の 2D 点と現実世界の 3D 点の関係は次のように書けます:
$$\mathbf{\tilde m} = \mathbf A [\mathbf R \quad \mathbf t] \mathbf {\tilde M}$$
ここで $\mathbf{\tilde m}$ は画像座標ベクトル $[u, v, 1]^T$、$\mathbf {\tilde M}$ は世界座標ベクトル $[X, Y, Z, 1]^T$、$\mathbf A$ は intrinsic matrix、$[\mathbf R \quad \mathbf t]$ は extrinsic matrix です。
カメラキャリブレーションについては、Richard Szeliski 著 Computer Vision: Algorithms and Applications の第6章 Feature-based alignment も参考になります。
画像から現実世界の 3D 点を復元するのは簡単ではありません。しかし、平面上に既知のパターン(pattern)を持つ物体、例えばチェスボードを用いると、各格子の相対座標が既知であり、さらに $Z$ 座標が一定と仮定できるため、複数枚のチェスボード画像から intrinsic matrix と extrinsic matrix を復元できます。本記事では、Zhengyou Zhang の論文 “A Flexible New Technique for Camera Calibration” で提案された 2D パターン(2D pattern)によるキャリブレーションに焦点を当て、数式の意味をより明確にしながら、コード例も示します。
¶ 2. Homography の計算
以降、平面パターンはチェスボードを代表として扱います。現実座標系においてチェスボード平面を $Z=0$ とすると:
$$
\begin{align}
{
\begin{bmatrix}
u \\
v \\
1
\end{bmatrix}
=
\mathbf A [\mathbf r1 \quad \mathbf r2 \quad \mathbf r3 \quad \mathbf t]
\begin{bmatrix}
X \\
Y \\
0 \\
1
\end{bmatrix}
} \\
{
=
\mathbf A [\mathbf r1 \quad \mathbf r2 \quad \mathbf t]
\begin{bmatrix}
X \\
Y \\
1
\end{bmatrix}
}
\end{align}
$$
ここで $\mathbf A [\mathbf r1 \quad \mathbf r2 \quad \mathbf t] $ が homography $\mathbf H$ です。
実際の状況では、チェスボード画像が複数枚あります:
画像解析により、各画像におけるコーナー点の 2D 座標を取得できます。
また、すべての画像でチェスボード上の座標は同一なので、チェスボードの 3D 座標を $(0, 0, 0)$、$(0, 1, 0)$、$(1, 1, 0)$、$(1, 2, 0)$、$(2, 1, 0)$ … のように仮定できます。
したがって、$\mathbf H$ は次式から求められます:
$$\mathbf{\tilde m} = \mathbf H \mathbf {\tilde M}$$
$\mathbf H$ を解く方法の1つは Zhang 論文の付録Aに記載されている手法で、次を解きます:
$$
\begin{bmatrix}
{\mathbf {\tilde M}}^T & \mathbf 0^T & -u {\mathbf {\tilde M}}^T\\
\mathbf 0^T & {\mathbf{\tilde M}}^T &-v{\mathbf {\tilde M}}^T
\end{bmatrix} \mathbf x = \mathbf L \mathbf x = 0
$$
左辺の行列を $\mathbf L$ と定義します。展開すると次の形になります:
$$
\begin{bmatrix}
&X_1 &Y_1 &1 &0 &0 &0 &-uX_1 &-uY_1 &-u \\
&0 &0 &0 &X_1 &Y_1 &1 &-vX_1 &-vY_1 &-v
\end{bmatrix}
$$
1枚の画像から2行が得られるので、画像が n 枚あると $\mathbf L$ は $2n \times 9$ 行列です。
$\mathbf x$ の解は「$\mathbf L^T \mathbf L$ の最小固有値に対応する固有ベクトル」です。コードのほうが直感的かもしれません:
L # 2n x 9 的 numpy 矩陣
w, v, vh = np.linalg.svd(L)
x = vh[-1]
$\mathbf x$ から得られる $\mathbf H$ は、係数 $\rho$ を掛けてスケールを補う必要があります:
$$
\mathbf H = \rho x = \rho
\begin{bmatrix}
x_1 &x_2 &x_3 \\
x_4 &x_4 &x_5 \\
x_6 &x_7 &x_8
\end{bmatrix}
$$
次式:
$$\mathbf{\tilde m} = \rho \mathbf x \mathbf {\tilde M}$$
に各対応点を代入して $\rho$ を求め、その平均を取るのが私のやり方です。
¶ 3. Intrisic Parameters の制約
$\mathbf H = [\mathbf h_1 \quad \mathbf h_2 \quad \mathbf h3]$ と定義します:
$$[\mathbf h_1 \quad \mathbf h_2 \quad \mathbf h3] = \lambda \mathbf A [\mathbf r_1 \quad \mathbf r_2 \quad \mathbf t]$$
$\lambda$ は任意の係数です。$r_1$ と $r_2$ が直交正規(orthonormal)であることから、次が得られます:
$$
\begin{align}
{\mathbf h_1}^T {\mathbf A}^{-T} \mathbf A^{-1} \mathbf h_2 &= 0 \\
{\mathbf h_1}^T {\mathbf A}^{-T} \mathbf A^{-1} \mathbf h_1 &= \mathbf {h_2}^T \mathbf A^{-T} \mathbf A^{-1} \mathbf h_2
\end{align}
$$
¶ 4. Intrisic Parameters の計算
intrinsic matrix はカメラ固有のパラメータであり、各画像で同一です。以降は論文の証明は省略し、intrinsic matrix の求め方に焦点を当てます。
第2節の手順で各画像の $\mathbf H$ が求まります。次を定義します:
$$
\mathbf B = {\mathbf A}^{-T} {\mathbf A}^{-1} =
\begin{bmatrix}
B_{11} &B_{12} &B_{13} \\
B_{12} &B_{22} &B_{23} \\
B_{13} &B_{23} &B_{33}
\end{bmatrix}
$$
$\mathbf B$ は対称行列です。さらに $\mathbf b = [B_{11}, B_{12} ,B_{22}, B_{23}, B_{33}, B_{11}]^T$ とします。
$\mathbf H$ は既知で、$\mathbf h_i$ を $\mathbf H$ の i 番目の列ベクトルとすると、$\mathbf h_i = [h_{i1}, h_{i2} ,h_{i3}]^T$ です。
ここで:
$$
\mathbf v_{ij} = [h_{i1} h_{j1}, h_{i1} h_{j2} + h_{i2} h_{j1}, h_{i2} h_{j2},
h_{i3} h_{j1} + h_{i1} h_{j3}, h_{i3} h_{j2} + h_{i2} h_{j3}, h_{i3} h_{j3}]^T
$$
を定義し、次を解きます:
$$
\begin{bmatrix}
\mathbf v_{12}^T \\
{( \mathbf v_{11} - \mathbf v_{22})}^T
\end{bmatrix} \mathbf b = \mathbf V \mathbf b = 0
$$
$\mathbf V$ は $2n \times 6$ 行列です。1枚の画像から2つの式が得られ、少なくとも 3 つの平面($n >= 3$)があれば $\mathbf b$ が解けます。
解法は同様に「$\mathbf L^T \mathbf L$ の最小固有値に対応する固有ベクトル」です:
w, v, vh = np.linalg.svd(V)
b = vh[-1]
その後、$\mathbf B$ から各パラメータを復元します:
$$
\begin{align}
v_0 &= (B_{12} B_{13} − B_{11} B_{23})/(B_{11} B_{22} − B_{12}^2)\\
λ &= B_{33} − [B_{13}^2 + v_0(B_{12}B_{13} − B_{11}B_{23})]/B_{11}\\
α &=\sqrt{λ/B_{11}}\\
β &=\sqrt{λB_{11}/(B_{11}B_{22} − B^2_{12})}\\
γ &= −B_{12} α^2 β/λ\\
u_0 &= γv_0/β − B_{13}α^2/λ\\
\end{align}
$$
これで intrinsic matrix $\mathbf A$ が得られます。定義に従って代入します:
$$
\mathbf A =
\begin{bmatrix}
α &γ &u_0 \\
0 &β &v_0 \\
0 &0 &1
\end{bmatrix}
$$
¶ 5. extrinsic parameters の計算
$\mathbf A$ は固定で、各画像から $\mathbf H$ が得られるため、extrinsic parameters を解析的に求められます。
$$
\mathbf H = [\mathbf h_1 \quad \mathbf h_2 \quad \mathbf h_3]
= \mathbf A [\mathbf r_1 \quad \mathbf r_2 \quad \mathbf r_3 \quad \mathbf t]
$$
関係式は次のとおりです:
$$
\begin{align}
\mathbf r_1 &= \lambda \mathbf A^{-1} \mathbf h_1 \\
\mathbf r_2 &= \lambda \mathbf A^{-1} \mathbf h_2 \\
\mathbf r_3 &= \mathbf r_1 \times \mathbf r_2 \\
\mathbf t &= \lambda \mathbf A^{-1} \mathbf h_3 \\
\end{align}
$$
ここで $\lambda$ はスケール係数(前の $\lambda$ とは別物)で、$ λ = 1/ \Vert \mathbf A^{−1} \mathbf h_1 \Vert = 1/ \Vert \mathbf A^{−1} \mathbf h_2 \Vert$ です。
これで intrinsic parameters と extrinsic parameters の両方が求まりました。
¶ OpenCV の calibrateCamera
上の手順により cv2.calibrateCamera と同等の機能を実装できます。OpenCV の cv2.calibrateCamera の定義は次です:
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, img_size,None,None)
cv2.calibrateCamera は extrinsic parameters を rotation vector と translation vector で表しますが、上で求めたのは行列なので変換が必要です。
rvecs は各画像の rotation vector、tvecs は各画像の translation vector です。各画像に対応する rotation と translation は次のように計算します:
from scipy.spatial.transform import Rotation as R
# A, h1, h2, h3 為已求得 numpy 矩陣
lambda_ = 1/np.linalg.norm(np.dot(np.linalg.inv(A), h1))
r1 = lambda_*np.dot(np.linalg.inv(A), h1)
r2 = lambda_*np.dot(np.linalg.inv(A), h2)
r3 = np.cross(r1, r2
r_matrix = np.array([r1, r2, r3)]).T
t = lambda_*np.dot(np.linalg.inv(A), h3)
r = R.from_matrix(r_matrix).as_rotvec()
rvecs.append(r)
tvecs.append(t)
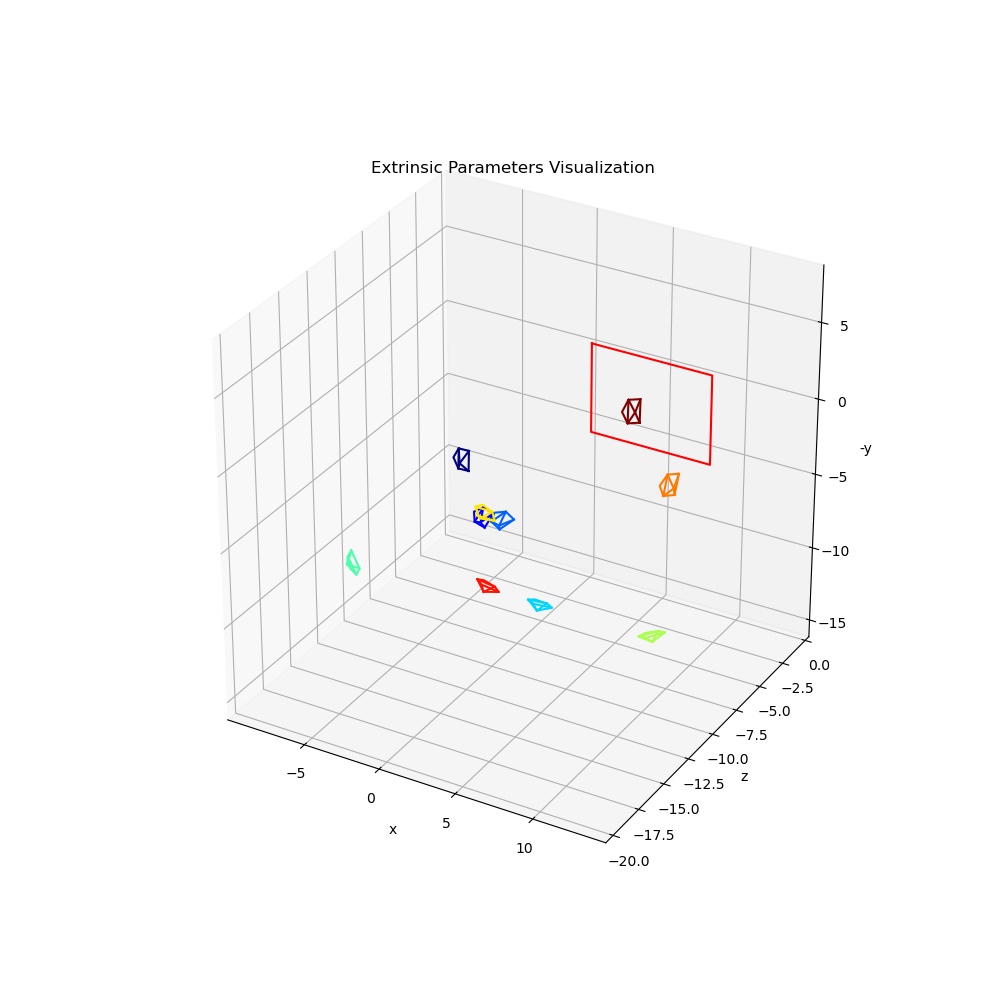
¶ Extrinsic の可視化
算出した extrinsics matrix を可視化すると、各画像が撮影された位置と角度を復元できます。小さな四角錐がカメラ、赤枠がチェスボードです。
¶ ちょっとしたコツ
チェスボード画像であれば cv2.findChessboardCorners を直接呼び出せます。
チェスボード画像は先に縮小しても良いです。pattern 点の検出は時間がかかりますし、画像座標が小さくなることで、展開される行列のサイズも小さくなります。
SVD を解く際は、行列の rank が十分かどうかに注意してください。
