二維模式相機校正 (2D Pattern Camera Calibration)
¶ 1. 簡介
相機校正 (Camera Calibration)是指取得相機的各種參數。意思是我們可以得到這個相機拍下這張照片時,這照片上的某個 2D 點對應到他現實世界的 3D 點的所有參數,包含 intrinsic parameters (相機本身參數) 和 extrinsic parameters (定向參數)。
照片 2D 點與現實世界 3D 點的關係如下:
$$\mathbf{\tilde m} = \mathbf A [\mathbf R \quad \mathbf t] \mathbf {\tilde M}$$
其中 $\mathbf{\tilde m}$ 是照片座標向量 $[u, v, 1]^T$,$\mathbf {\tilde M}$ 是現實座標向量 $[X, Y, Z, 1]^T$,而 $\mathbf A$ 是 intrinsic matrix、$[\mathbf R \quad \mathbf t]$ 是 extrinsic matrix。
關於相機校正可參考 Richard Szeliski 所著《Computer Vision: Algorithms and Applications》第六章 Feature-based alignment。
要取得照片對應現實世界的 3D 點座標不容易,但如果利用有模式 (pattern) 的平面物品,例如棋盤,因為每個格子相對座標都是已知的,且可以假設其 $Z$ 座標都是相同的,就可以直接藉由多張棋盤的照片,直接還原其 intrisic matrix 和 extrinsic matrix。本文著重於 Zhengyou Zhang 在〈A Flexible New Technique for Camera Calibration〉所提出用 2D 模式 (2D pattern) 來做相機校正的方法,針對其數學做更明白的解釋和程式碼示例。
¶ 2. 求 Homography
以下將平面模式物品皆用棋盤來代稱。當我們把現實座標的棋盤設為 $Z=0$ ,我們會得到:
$$
\begin{align}
{
\begin{bmatrix}
u \\
v \\
1
\end{bmatrix}
=
\mathbf A [\mathbf r1 \quad \mathbf r2 \quad \mathbf r3 \quad \mathbf t]
\begin{bmatrix}
X \\
Y \\
0 \\
1
\end{bmatrix}
} \\
{
=
\mathbf A [\mathbf r1 \quad \mathbf r2 \quad \mathbf t]
\begin{bmatrix}
X \\
Y \\
1
\end{bmatrix}
}
\end{align}
$$
其中 $\mathbf A [\mathbf r1 \quad \mathbf r2 \quad \mathbf t] $ 為 homography $ \mathbf H$。
在實際情況我們已經有很多棋盤的照片
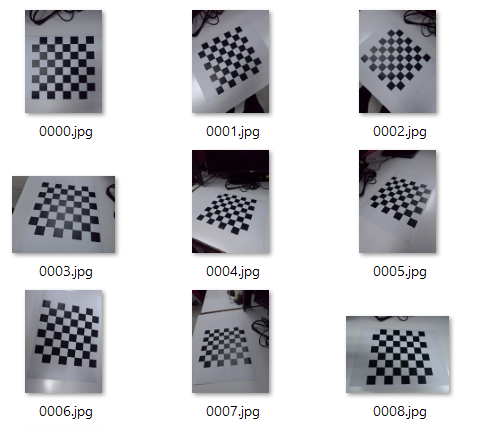
我們經由圖片分析可以取得每張照片裡面格點的 2D 座標。
同時我們知道這些照片裡面的棋盤座標都是相同的,所以可以假設棋盤的 3D 座標是 $(0, 0, 0)$、$(0, 1, 0)$、$(1, 1, 0)$、$(1, 2, 0)$、$(2, 1, 0)$ …。
於是我們就可以求 $\mathbf H$:
$$\mathbf{\tilde m} = \mathbf H \mathbf {\tilde M}$$
解 $\mathbf H$ 的一種方法參照 Zhang 的論文附錄 A,求以下解:
$$
\begin{bmatrix}
{\mathbf {\tilde M}}^T & \mathbf 0^T & -u {\mathbf {\tilde M}}^T\\
\mathbf 0^T & {\mathbf{\tilde M}}^T &-v{\mathbf {\tilde M}}^T
\end{bmatrix} \mathbf x = \mathbf L \mathbf x = 0
$$
定義 $\mathbf x$ 左邊的矩陣為 $\mathbf L$,爆開來的話會長得像這樣:
$$
\begin{bmatrix}
&X_1 &Y_1 &1 &0 &0 &0 &-uX_1 &-uY_1 &-u \\
&0 &0 &0 &X_1 &Y_1 &1 &-vX_1 &-vY_1 &-v
\end{bmatrix}
$$
一張照片可以提供兩行,有 n 張照片的話,$\mathbf L$ 就會是一個 $2n \times 9$ 的矩陣。
$\mathbf x$ 的解就會是 the eigenvector of $\mathbf L^T \mathbf L$ associated with the smallest eigenvalue。用程式碼可能會比較直覺:
L # 2n x 9 的 numpy 矩陣
w, v, vh = np.linalg.svd(L)
x = vh[-1]
透過 $\mathbf x$ 算出的 $\mathbf H$ 算出來需要補一個係數 $\rho$ 回去:
$$
\mathbf H = \rho x = \rho
\begin{bmatrix}
x_1 &x_2 &x_3 \\
x_4 &x_4 &x_5 \\
x_6 &x_7 &x_8
\end{bmatrix}
$$
根據
$$\mathbf{\tilde m} = \rho \mathbf x \mathbf {\tilde M}$$
我的算法是用每個對應的座標帶入式子得到 $\rho$ 取平均。
¶ 3. Intrisic Parameters 的限制
定義 $\mathbf H = [\mathbf h_1 \quad \mathbf h_2 \quad \mathbf h3]$:
$$[\mathbf h_1 \quad \mathbf h_2 \quad \mathbf h3] = \lambda \mathbf A [\mathbf r_1 \quad \mathbf r_2 \quad \mathbf t]$$
$\lambda$ 是一個任意係數,根據 $r_1$ 和 $r_2$ 是正交 (orthonormal),可以有以下式子:
$$
\begin{align}
{\mathbf h_1}^T {\mathbf A}^{-T} \mathbf A^{-1} \mathbf h_2 &= 0 \\
{\mathbf h_1}^T {\mathbf A}^{-T} \mathbf A^{-1} \mathbf h_1 &= \mathbf {h_2}^T \mathbf A^{-T} \mathbf A^{-1} \mathbf h_2
\end{align}
$$
¶ 4. 求 Intrisic Parameters
因為 intrinsic matrix 是相機本身參數,所以每張照片都會一樣。接下來都跳過論文證明過程,直接看如何求 intrinsic matrix。
根據第 2 節,我們可以取得每一張照片的 $\mathbf H$。然後令:
$$
\mathbf B = {\mathbf A}^{-T} {\mathbf A}^{-1} =
\begin{bmatrix}
B_{11} &B_{12} &B_{13} \\
B_{12} &B_{22} &B_{23} \\
B_{13} &B_{23} &B_{33}
\end{bmatrix}
$$
$\mathbf B$ 是一對稱矩陣,然後令 $\mathbf b = [B_{11}, B_{12} ,B_{22}, B_{23}, B_{33}, B_{11}]^T$
$\mathbf H$ 已經知道,令 $\mathbf h_i$ 指 $\mathbf H$ 的第 i 個直欄,所以 $\mathbf h_i = [h_{i1}, h_{i2} ,h_{i3}]^T$
然後定義
$$
\mathbf v_{ij} = [h_{i1} h_{j1}, h_{i1} h_{j2} + h_{i2} h_{j1}, h_{i2} h_{j2},
h_{i3} h_{j1} + h_{i1} h_{j3}, h_{i3} h_{j2} + h_{i2} h_{j3}, h_{i3} h_{j3}]^T
$$
接著只要解
$$
\begin{bmatrix}
\mathbf v_{12}^T \\
{( \mathbf v_{11} - \mathbf v_{22})}^T
\end{bmatrix} \mathbf b = \mathbf V \mathbf b = 0
$$
其中 $\mathbf V$ 是一個 $2n \times 6$ 的矩陣。一張照片會有兩個式子,當我們有至少 3 個平面 ( $n >= 3$) 時,我們就能求得 $\mathbf b$ 的解。
然後解法一樣,會是 the eigenvector of $\mathbf L^T \mathbf L$ associated with the smallest eigenvalue:
w, v, vh = np.linalg.svd(V)
b = vh[-1]
接著從 $\mathbf B$ 找出各項參數:
$$
\begin{align}
v_0 &= (B_{12} B_{13} − B_{11} B_{23})/(B_{11} B_{22} − B_{12}^2)\\
λ &= B_{33} − [B_{13}^2 + v_0(B_{12}B_{13} − B_{11}B_{23})]/B_{11}\\
α &=\sqrt{λ/B_{11}}\\
β &=\sqrt{λB_{11}/(B_{11}B_{22} − B^2_{12})}\\
γ &= −B_{12} α^2 β/λ\\
u_0 &= γv_0/β − B_{13}α^2/λ\\
\end{align}
$$
就可以得到 intrinsic matrix $\mathbf A$,根據定義代回去就好:
$$
\mathbf A =
\begin{bmatrix}
α &γ &u_0 \\
0 &β &v_0 \\
0 &0 &1
\end{bmatrix}
$$
¶ 5. 求 extrinsic parameters
因為 $\mathbf A$ 是固定的,每張照片有可以得到一個 $\mathbf H$,因此我們就可以解析出 extrinsic parameters。
$$
\mathbf H = [\mathbf h_1 \quad \mathbf h_2 \quad \mathbf h_3]
= \mathbf A [\mathbf r_1 \quad \mathbf r_2 \quad \mathbf r_3 \quad \mathbf t]
$$
其關係如下:
$$
\begin{align}
\mathbf r_1 &= \lambda \mathbf A^{-1} \mathbf h_1 \\
\mathbf r_2 &= \lambda \mathbf A^{-1} \mathbf h_2 \\
\mathbf r_3 &= \mathbf r_1 \times \mathbf r_2 \\
\mathbf t &= \lambda \mathbf A^{-1} \mathbf h_3 \\
\end{align}
$$
其中 $\lambda$ 是比例係數 (與之前的 $\lambda$ 不一樣),其值為 $ λ = 1/ \Vert \mathbf A^{−1} \mathbf h_1 \Vert = 1/ \Vert \mathbf A^{−1} \mathbf h_2 \Vert$。
到這邊我們就已經把 intrinsic parameters 和 extrinsic parameters 都求出來了。
¶ OpenCV 的 calibrateCamera 函數
經由上面算法,我們可以實現跟 cv2.calibrateCamera 一樣功能的函數,這邊對照 OpenCV 實現的 cv2.calibrateCamera 函數定義:
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, img_size,None,None)
發現 cv2.calibrateCamera 使用 rotation vector 和 translation vector 來表示 extrinsic parameters,而上面我們算出的是矩陣,所以需要做轉換。
其中 rvecs 為所有照片的 rotation vector, tvecs 為所有照片的 translation vector,而每一個照片所對應的 rotation 和 translation 算法如下:
from scipy.spatial.transform import Rotation as R
# A, h1, h2, h3 為已求得 numpy 矩陣
lambda_ = 1/np.linalg.norm(np.dot(np.linalg.inv(A), h1))
r1 = lambda_*np.dot(np.linalg.inv(A), h1)
r2 = lambda_*np.dot(np.linalg.inv(A), h2)
r3 = np.cross(r1, r2
r_matrix = np.array([r1, r2, r3)]).T
t = lambda_*np.dot(np.linalg.inv(A), h3)
r = R.from_matrix(r_matrix).as_rotvec()
rvecs.append(r)
tvecs.append(t)
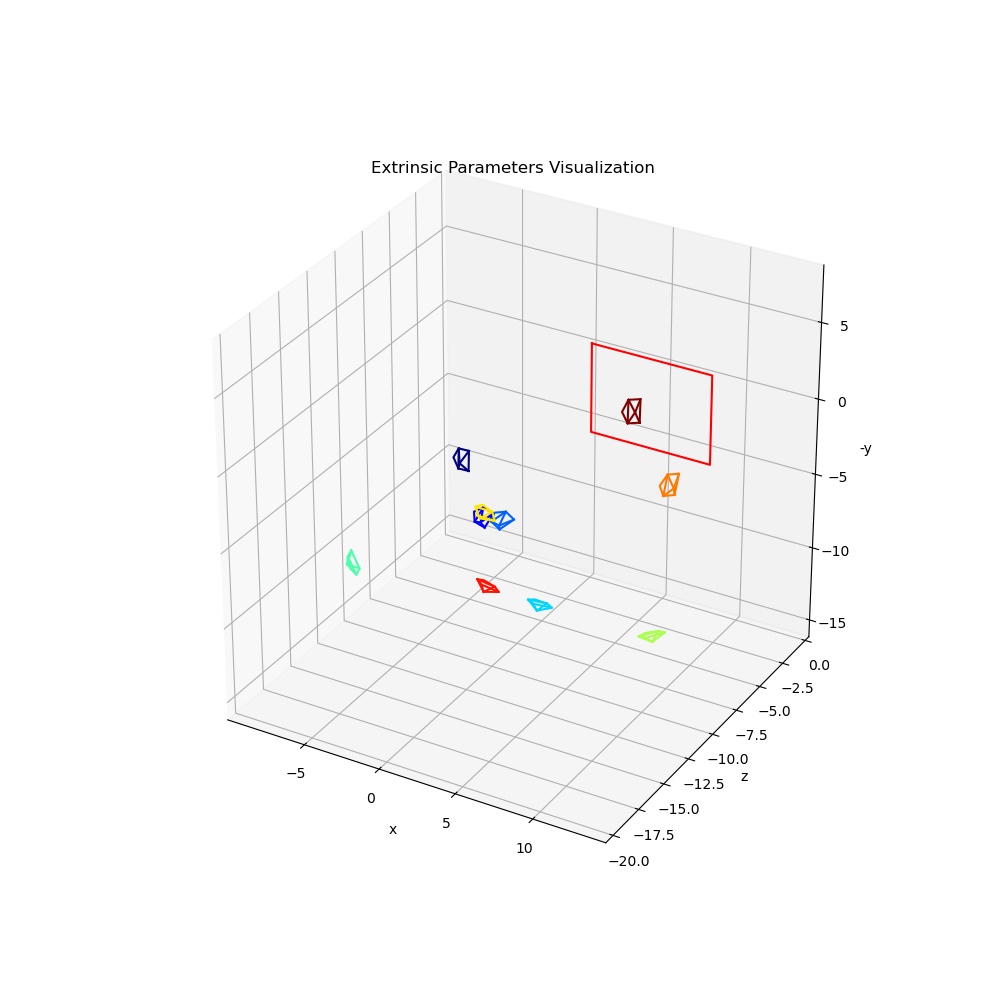
¶ Extrinsic 視覺化
將算出來的 extrinsics matrix 算出來之後,進行視覺化,就可以還原每張照片原本拍攝的位置與角度。小四角錐是相機,紅色方框則是棋盤。
¶ 一些小技巧
如果照片是棋盤,可以直接呼叫 cv2.findChessboardCorners。
棋盤圖片可以先縮小,因為找 pattern 的點要花時間,同時因為照片座標都變小,也可以降低矩陣爆開的大小。
求 SVD 的時候,要注意 rank of matrix 夠不夠解開矩陣。
